����늙C���ИI�Б��ÏV����늙C���ڸ����ИI�аl�]�����P��Ҫ�����á���ˣ��J�R�������������\��ԭ���dz���Ҫ��
��\�Б�늙C���了�ε��OӋ��������ʹ�ö����@�M�a�����D�ň����Q��늙C�D�ٵ�ͬ���ٶ�ȡ�Q���Դ�l�ʺͶ��ӘO�����@���D�ӸБ�늙C���Sͨ�^����׃�����M��׃�٣������ھS�o���}���@���D��늙C�ѽ���̫�ܚgӭ��ͬ��늙C����ֱ������D�ӣ�ֻҪ��ѭ���_�Ć��ӳ������ڲ�ͬؓ�d�±��ֺ㶨�ٶȡ�
���Č���Ԕ�����о���\ʽ�Б�늙C���@���D�ӸБ�늙C��ͬ��늙C��
��\ʽ�Б�늙C
���I�ϑ��ÏV����늙C��������\ʽ�Б�늙C���D1�е���\늙C�Ѓɲ��֣��D�Ӻ����ඨ�ӡ��g�Z��늘С���ʾ���@�M�͓Q�����M�ɵ����D���������g�Z���D�ӡ���ʾ�������@�M��늙C�����D������Ոע���ӛ�� T1��T2 �� T3 ��늙C�����Ę��R�����ε��OӋ����\늙C�����˵����c֮һ��
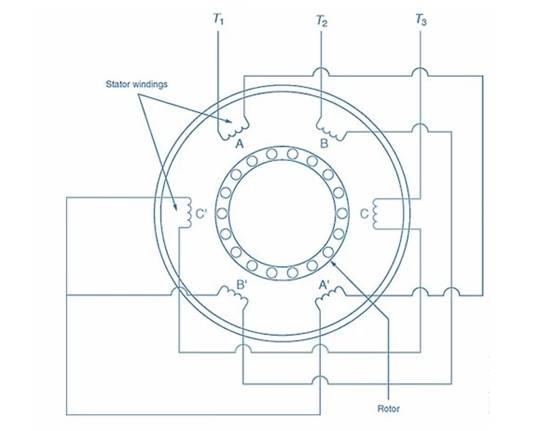
�D 1. ��\ʽ�Б�늙C���DƬ�� Amna Ahmad �ṩ��\ʽ늙C���D�ӛ]���@�M���෴�������B����ÿ���ˌ��˭h�ϵĽ��ٗl�M�ɡ����ٗl֮�g�njӉ����ٰ塣��늙C�\�����g�����ٗl�Е��Б���늉����Ķ��a������ʹň������ϣ���\ʽ늙C�������@�N�D�������ģ������������͂}��\���ﳣҊ���\��݆��
�D 2 �f����ʩ�ӵ������@�M�����ཻ���Դ�������Դÿ120��a��һ����ֵ늉���
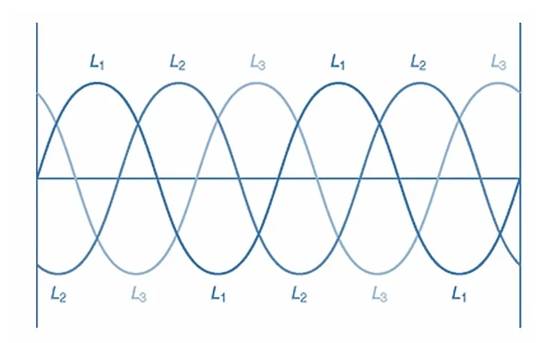
�D 2. ���ನ�Ρ��DƬ�� Amna Ahmad �ṩ
�F�ڣ�Ոע��D 3 �ж����е��������������@�M�����@�M���@�����⚤��������С�����ʩ�ӵ��������T1������������_����ֵ�r�����@�MT2��T3�������෴�ĘO�ԣ�����������ֵ����0��������ֵ֮ؓ�g���� T2 ���������������_����ֵ�r��T1 �� T3 �������෴�ĘO�ԣ�����������ֵ���� 0 ��ֵ֮ؓ�g���@�Nģʽ����ʩ�ӵĽ������Ҳ������� 360�� ���D�г��m���ڡ�
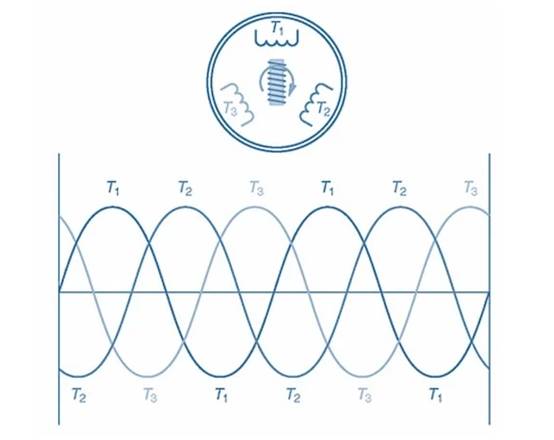
�D 3. ��λ���D�ڶ����Юa�����D�ň����DƬ�� Amna Ahmad �ṩ�����܇����F���D�ň������D�������D���ٶȾ���ͬ���ٶȡ�ͬ���ٶ��ܶ��ӘO������ʩ�ӽ�����l�ʵ�Ӱ푡��@�N�Pϵ����������Ĺ�ʽ���f����
S=120��fP
S = ͬ���ٶȣ�rpm��
F = ��ʩ�ӽ���늵��l�ʣ��Ժ�Ɲ (Hz) ���λP = ���ӘO��
���磬ʹ�� 60 Hz �����Դ�\�е��ĘO��\늙C��ͬ���ٶ��Ƕ��٣�
��Щ�rֵ�^����֪�ģ�
F = 60��Ɲ
P = 4
��ʲô�rֵ�Dz�֪���ģ�
S = ?
������ʲô��ʽ�أ�
S=120��fP=120��604=1800rpm
��ˣ�ԓ��\늙C��ͬ���D�ٞ�ÿ���1800�D��
���ӵ����D�ň����D�ӌ��l�иБ���늉����Ķ��a��������D�ӌ��l�е�����a����һ���ň���ԓ�ň��������е����D�ň������������D���D�Ӳ��a��Ť�ء�Ȼ�����D�Ӳ������c�������D����ͬ���ٶ����D���S���е�Ħ�����L�裨�L�裩�������D�����������ٶ����D���@�Q���D�ӻ���D�ӻ�����ͬ���ٶȺ��D���ٶ�֮�g���ٶȲ
ֱ��������\늙C߀���J���Ƕ���늙C���������ͬ���ٶȹ�ʽ���Կ�������׃늙C�ٶȵķ����Ǹ�׃��ʩ�ӵĽ���늉����l�ʻ��׃늙C�ĘO�������������˾���Դ���l�ʜʴ_�ؾS���� 60 Hz����ˣ���׃��ʩ�ӵĽ����Դ���l�ʲ���һ�N�x��Ҳ�����ܸ�׃늙C�ĘO�����l�әC�����ȫ�ؽ���Ȼ�������ͨ�^���׃����������ʩ�ӵĽ����Դ���l�ʿ��Ը�׃�������\늙C���ٶ�Ҳ���Ը�׃��ʹ�ù̑BԪ�������׃������ͨ�^��ʩ�ӵĽ�����D�Q��ֱ��늁팍�F�@һ�c����ֱ���ز����l�ʿ�׃���}�_�������@Щ�}�_�D�Q�����콻��늣�Ȼ������늙C���F�ڣ���ʩ�ӵĽ����Դ���l�ʿ��Ը�׃���Ķ����S늙C�M��׃���\�С�
Ҫ���D��\ʽ늙C�����D����ֻ�軥�Q������������������ɂ����B�Ӽ��ɡ�ͨ����T1 �� T3 ���Ի��Q���@�����¶����е����D�ň����෴�������D���D�ӌ������D�ň����·����D�ӣ�ԓ�����cԭʼ�����෴��
��\ʽ�Б�늙C����
��\ʽ�Б�늙C������Թ̵ĽY���Ϳɿ��Զ��V���������S���ИI��һ���Ҫ�đ������ڹ��I�Cе�У�������á����s�C��ݔ�͙C�ṩ�������ṩ��Ч�\�������Ť�غ��ٶȡ����⣬�@Щ늙Cͨ�����ɵ������̘I�������I�Oʩ�� HVAC ϵ�y�У��_���m����ͨ�L�͚����ơ�
���⣬ͨ�^����\ʽ�Б�늙C�B�ӵ�늾W�����Ԍ������������l늙C���ڴ��O���У����քӻ�ͨ�^�����D��늙C�S�r�� ����늴ŸБ��F�����@�M�ϕ��a��늄ӄ�(EMF)��ԓ늄ӄݮa������ݔ����������늾W�Դ����Ч�،��Cе���D�Q����ܡ�ԓ���Ì��ڂ����Դ��늾W�B�Ӳ��ɿ���ƫ�h�^���B�m������P��Ҫ�ľo����r�e���á�
�@���D�ӸБ�늙C
��\ʽ늙C��һ�N׃�w���@���D�ӸБ�늙C��ԓ늙C���OӋ�Ǟ��˝M��׃������늙C������Ȼ�����S�����׃�l����ʹ�õ����ӣ���׃��Խ��Խ����Ҋ��
�@���D�ӸБ�늄әC�ɰ����@�M���D�ӡ����h���ˢ�����ඨ�ӽM�ɡ��D 4 �@ʾ���@���D�ӸБ�늙C�IJ�����Ոע��늙C�����Ę��R�����ж����B�Ә�ӛ�� T1��T2 �� T3���@���D���B�Ә�ӛ�� M1��M2 �� M3���D 4 ߀�@ʾ���B�ӵ��D���·�� M1��M2 �� M3 ������׃������
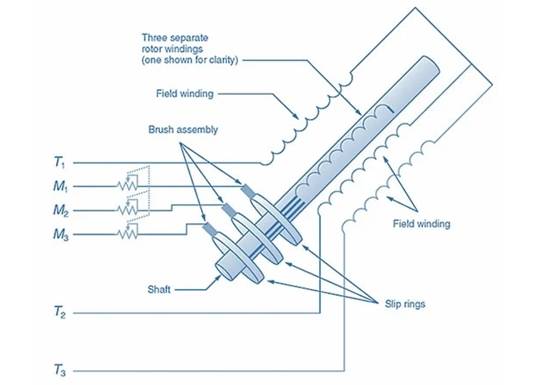
�D 4.�@���D�ӸБ�늙C�IJ��������������Ҋ���D���S�σH�@ʾ��һ���@�M���DƬ�� Amna Ahmad �ṩ�����Դʩ�ӵ������@�M���a�����D�ň�����늉��Б��������D���@�M�С�ԓ�Б�늉��a��������Ķ����D���@�M�Юa���ň����D�ӵĴň��c���ӵ����D�ň�����ã������D���D�ӡ�ͨ�^��׃����׃���������Ը�׃�D�Ӵň��ď��ȡ�����ň��p�����D���ٶȾ͕����͡����ň��ӏ��r���D���ٶ����ӡ�
�@�N���D�Ӵň��Ŀ��ƿ��������Ӻ㶨ؓ�d�r��׃�@���D�ӸБ�늙C���ٶȡ����⣬�D�Ӵň�����ͨ�^�Ԅӻ��^�́���׃����푑�׃����ؓ�d�l�������@�N��ʽ���@���D�ӸБ�늄әC���ٶȿ��Ա����ஔ�㶨��
Ҫ���D�@���D�ӸБ�늙C�����D����ֻ�軥�Q������������������ɂ����B�Ӽ��ɡ�ͨ����T1 �� T3 ���Ի��Q���@���¶����е����D�ň����෴�������D��Ȼ���D�������D�ň����·����D�ӣ�ԓ�����cԭʼ�����෴��
�@���D�ӸБ�늄әCҲ��ȱ�c��������Ƴߴ����\늙C�����F�������ˢ�ͻ��hĥ�p����Ҫ����ľS�o�������mȻ���ṩ׃�٣�������ʹ���������@�N��̎׃�ò���ô����������
�@���D�ӸБ�늙C����
�@���D�ӸБ�늙C���ж���ԺͿɿ��ԣ��dz��m��Ҫ����̵đ��á�һ�Nֵ��ע�����;������ͽ����ИI�е����ؙC�ͺ��J�����е��ٶȺ�Ť�ؿ��ƌ��ڰ�ȫ��Ч�����ز������P��Ҫ�����⣬�@Щ늙Cͨ�����ڲɵV�O���Ј��������΄գ������ӂ��͎��͞��@�C�ṩ���������⣬��������Ҫ׃�ٿ��ƵĴ��ͱú��L�ȵĽM�ɲ��֣��ɴ_�����I�^���е����ܺ���ԴЧ�ʡ�
ͬ��늙C
ͬ��늙C����D 5 ��ʾ���������ඨ�ӡ��@���D�ӡ����h���ˢ��Ȼ�����c�@���D�ӸБ�늙C�������@�M��ȣ��D�Ӿ��І��@�M���D��߀�����������\ʽ늙C�D�ӵĶ�·����ͬ��늙C�������ڶ����B�Ә�ӛ�� T1��T2 �� T3�������D���B�Ә�ӛ�� R1 �� R2��ֱ���Դ���D�ӹ�늡�
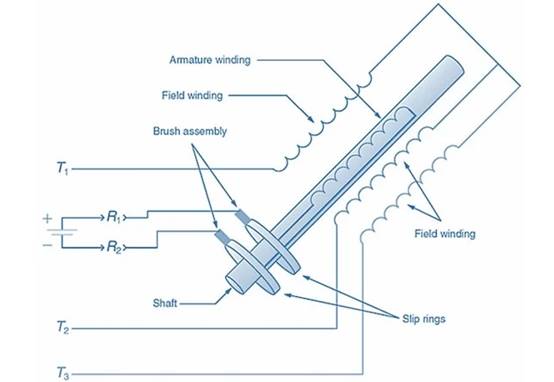
�D 5. ͬ��늙C�IJ�����ע��ʩ�ӵ��D���@�M��ֱ��늡��DƬ�� Amna Ahmad �ṩͬ��늙Cͨ�^����ʩ�������Դ�톢�ӡ�Ȼ�����˕r�D��δͨ늡��������Դʩ�ӵ����ӕr���͕��a�����D�ň������D�ň����D�ӵĶ�·���иБ���늉���ԓ�Б�늉��a��������Ķ����D���Юa���ň���Ȼ���D�ӱ����ӵ����D�ň������������D���D�ӡ�
���D���_���ٶȕr��ֱ���Դͨ늣��Ķ���ֱ���ʩ�ӵ��D���@�M���@�����D�ӳ䮔늴��w���D�ӬF���c���ӵ����D�ň�ͬ���i�����@ʹ��ͬ��늙C�܉�Ŀ��d���M�d�l�����Ժ㶨�ٶ��\�С���Ҫӛס��һ�l��ҪҎ�t�ǣ�ͬ��늙C�^�������D���@�Mʩ��ֱ��늵���r���ӡ����ͬ��늙C���@�N��ʽ���ӣ��D�ӌ��o���D�ӣ��Ķ��p���D�Ӻ�ֱ���Դ��
Ҫ���Dͬ��늙C�����D��ֻ�軥�Q������������������ɂ����B�Ӽ��ɡ�ͨ����T1��T3���Q�����¶����е����D�ň����෴�������D��Ȼ���D�������D�ň����·����D�ӣ�ԓ�����cԭʼ�����෴��
ͬ��늙C����
ͬ��늙C����Ҫ�ٶȿ��ƺ��c���ϵ�yͬ���đ����аl�]���P�I���á��������@�������ǰl늏S������������ͬ���l늙C���Ը�Ч�������ķ�ʽ�l늡��ڴ������I�У��@Щ늙C�鴬�������Mϵ�y�ṩ�������錧���ṩ��Ч��푑��`�������ܡ����⣬ͬ��늙C߀���ډ��s�C���x�ıõȸ����ܹ��I�Cе�����е��ٶ��{�������\�к������P��Ҫ�� |