늙C(j��)�����ڌ�(sh��)�F(xi��n)�@Щ���Z����l(f��)�]����Ҫ���ã��������ԭ���nj�(sh��)�F(xi��n)Ŀ��(bi��o)�ĵ�һ�����oˢֱ��(BLDC)늙C(j��)������늙C(j��)���Ƶ��P(gu��n)�IҪ�أ��Լ�������ڽ��ͳɱ�����(ji��)ʡ���g��������ܵ�ͬ�r(sh��)���Ч�ʡ�
��1����ͬ��늙C(j��)���
���ЎN��͵�늙C(j��)������?f��)���ã���ˢ���oˢֱ��(BLDC)�����M(j��n)�Б�(y��ng)���ɷN���������P(gu��n)�ğoˢ늙C(j��)�����BLDC������ͬ��늙C(j��)(PMSM)��
���oˢ늙C(j��)�ڮ�(d��ng)����S����(y��ng)����׃�÷dz����У���?y��n)����������ˌ?du��)늙C(j��)�ˢ����Ҫ���@ЩBLDC��?f��)�ʹ�ÓQ��߉���Ƅ�(d��ng)�D(zhu��n)�ӣ�ʹ����Ӹ�Ч�Ϳɿ���
����ˢ늙C(j��)�ēQ�����ˢ/�Q�����ӿڮa(ch��n)����ԓ�����(hu��)��(d��o)��Ħ����늻����S���r(sh��)�g�����ƕ�(hu��)�����ˢ�����ܡ��@�NĦ��?x��)��a(ch��n)���������s��늙C(j��)������
���c��ˢ늙C(j��)��ȣ�BLDC늙C(j��)�����S����(y��u)�c(di��n)��������(ji��)�ܡ���С�����p�������o�����ɿ��Ҹ����á����⣬�����ṩ���_���ٶȿ��ƣ����m��׃�ّ�(y��ng)�á�
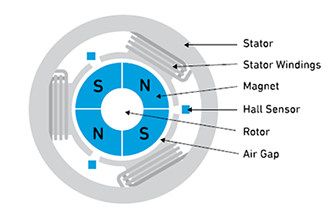
��2���˽�BLDC��PMSM��늙C(j��)
��BLDC��PMSM늙C(j��)����(j��)ͬ��늙C(j��)��ԭ���������D(zhu��n)����ÿ�ΓQ��r(sh��)�^�m(x��)���ӣ����늙C(j��)�B�m(x��)�\(y��n)��(d��ng)��Ȼ�����@�ɷNֱ��늙C(j��)�Ķ����@�M���в�ͬ�Ď��Π���������(hu��)�a(ch��n)����ͬ�ķ�늄�(d��ng)��(sh��)(BEMF)푑�(y��ng)��BLDC BEFM�����εġ�PMSM늙C(j��)��������BEMF����˾�Ȧ�@�M�����ҷ�ʽ�p�@����������ȵ�������ܣ��@Щ늙C(j��)ͨ��ʹ�����Ҳ��Q��
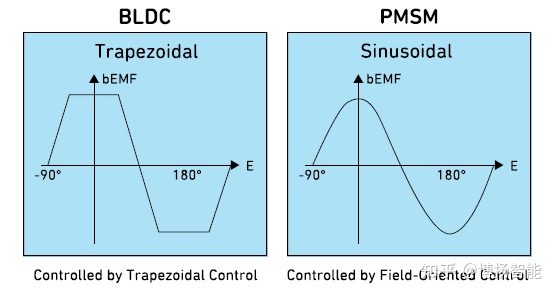
BLDC��PMSM늙C(j��)���\(y��n)�Еr(sh��)ͨ�^���@�M�a(ch��n)��BEMF�����κ�늙C(j��)�У������\(y��n)��(d��ng)���a(ch��n)����늄�(d��ng)��(sh��)�Q�鷴늄�(d��ng)��(sh��)(BEMF)����?y��n)�늙C(j��)�иБ�(y��ng)��늄�(d��ng)��(sh��)�c�l(f��)늙C(j��)��늄�(d��ng)��(sh��)�෴��
��3���ň�������ƵĽ��
��Ҫ�@�ÿ���PMSM늙C(j��)�����Ҳ��Σ���Ҫ�ň��������(FOC)�㷨��FOCͨ����������ȵ����PMSM����늙C(j��)��Ч�ʡ�PMSM�����ҿ�������BLDC���ο���������(f��)�s���ɱ����ߡ�Ȼ�����@�N�ɱ����ӎ����ă�(y��u)�c(di��n)����������е������ͺ��C�����١�BLDC����Ҫ��(y��u)�c(di��n)�Ǹ����ڿ��ơ���K���x���ķN늙C(j��)���ȡ�Q���䑪(y��ng)�á�
��4�����������͟o��������BLDC��PMSM늙C(j��)
��BLDC��PMSM늙C(j��)�����ǎ���������o�������ġ�����������늙C(j��)������Ҫ늙C(j��)��ؓ(f��)�d�l������(d��ng)�đ�(y��ng)�á�����ʹ��Ƕ��늙C(j��)�����еĻ��������������������|(zh��)����һ��(g��)�_�P(gu��n)���䔵(sh��)��ݔ�����ڸМy(c��)���Ĵň��O�ԡ�늙C(j��)��ÿ���Ҫһ��(g��)�Ϊ�(d��)�Ļ�������������ˣ�����늙C(j��)��Ҫ����(g��)�������������o������늙C(j��)��Ҫ�㷨��ʹ��늙C(j��)����������M(j��n)�в�����������ه��BEMF��Ϣ��ͨ�^��(du��)BEMF�M(j��n)�вɘӣ������Ɣ���D(zhu��n)��λ�ã��Ķ��o��ʹ�û���Ӳ���Ă��������oՓ늙C(j��)��?f��)�Y(ji��)��(g��u)��Σ������@Щ�C(j��)������Ҫ֪���D(zhu��n)��λ�ã��Ա������Ч��?f��)Q��늙C(j��)��
5��늙C(j��)����ܛ���㷨
��ܛ���㷨�����O(sh��)Ӌ(j��)���ڈ�(zh��)���ض��΄�(w��)��һ�Mָ�����Ӌ(j��)��C(j��)�������ڿ���BLDC��PMSM늙C(j��)���@Щܛ���㷨ͨ�^�O(ji��n)ҕ�Ϳ���늙C(j��)�\(y��n)�Ё����Ч�ʲ������\(y��n)�I�ɱ����㷨��һЩ��Ҫ������늙C(j��)��ʼ���������������D(zhu��n)��λ�Ùz�y(c��)�Լ��������ӻ�p������������_�P(gu��n)��̖(h��o)�z�顣
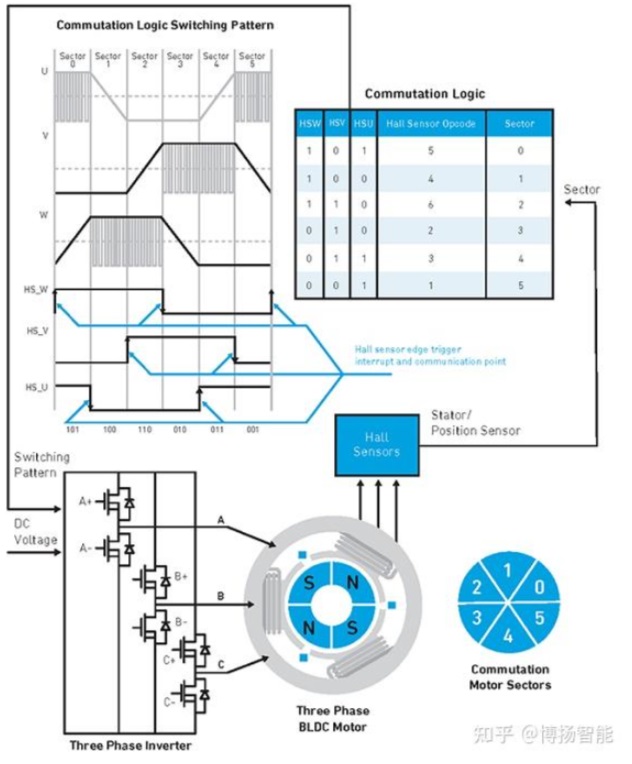
��6�����������̎��늙C(j��)��������Ϣ
������BLDC늙C(j��)������(g��)��B(t��i)�����D��ʾ����λ���a�����ڱ�ʾ1��6֮�g�IJ����a��̖(h��o)�����Â�������ʹ�ð˂�(g��)�����a�е�����(g��)��1��6���ṩ��λ��(sh��)��(j��)ݔ��������Ϣ�����ã���?y��n)���������Դ_���Εr(sh��)�l(f��)���˷Ƿ������a������(j��)�Ϸ������a��1��6����ȡ�Є�(d��ng)��������ʾ��ԓ�㷨�@ȡ���������������a����(du��)���M(j��n)�н�a����(d��ng)���������������a��ֵ�l(f��)��׃���r(sh��)����������׃ͨ늷����Ԍ�(sh��)�F(xi��n)�Q��������ʹ�ò����a�IJ��ұ�����ȡͨ���Ϣ����������׃�����µ��ȅ^(q��)����ͨ늺ň��Ƅ�(d��ng)���µ�λ�ã��Ƅ�(d��ng)�D(zhu��n)���S֮�Ƅ�(d��ng)��
|
��Ϣ")