�ڎ����ЙC늑����У�늙C���ƶ�������OӋ��һ���������档�C���˺�늄���܇ (EV) ���I����Ҫ��늙C�M���·�̼����ƣ��Կɿ���Ӱ푽o���O����\�ӡ�
ÿ�N��͵�늙C�����Լ��Ŀ���Ҫ����Ҫ���ص��·�����_���������⡣�ڱ����У��҂����˽�ֱ��늙C���ơ�H ���·�ͻ��aPWM�ȿ��Ƽ��g��
H ����ԭ������ʲô�� H ���·��
���ӺͿ���ֱ��늙C�r�������͑��ÏV�����·�� H ������TI �Ĕ������п���һ��ʾ����
��D 1 ��ʾ��H �����Ă��_�P�M�ɣ�ͨ��ʹ�Ç��@ֱ��늙C�ġ�H�����ؓ�Y���е� ����������댧�w��Ч�����w�� (MOSFET) �팍�F��
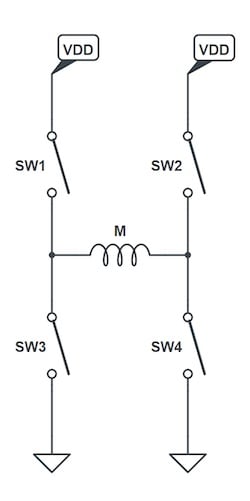
�D 1.����ֱ��늙C���ƵĘ˜� H ���·
H ���������ֱ��늙C���Ƶ������·�������ͨ�^���x��ش��_���P�]һϵ���@Щ�_�P������늙C�ķ�����ٶȡ�
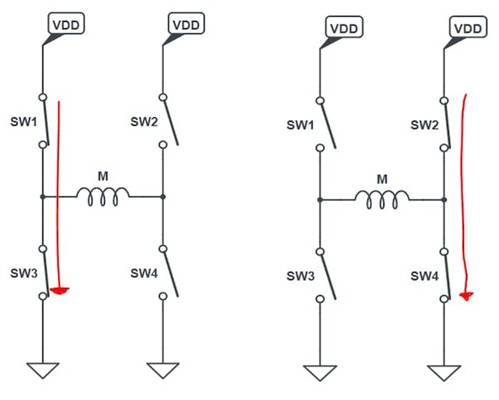
��D 2 ��ʾ��ͨ�^�� SW2 �� SW3 �P�]��ͬ�r���_ SW1 �� SW4���҂����Կ���������ض��������^늙C���Ķ�ʹ�䳯һ�������D�ӡ�
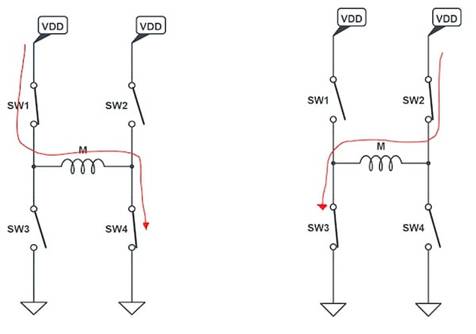
�D 2. ���x��ش��_���P�]�@Щ�_�P������늙C���ٶȺͷ���
Ҫ���෴�ķ����D��늙C���҂������෴�IJ����� SW1 �� SW4 �����P�]��B��ͬ�r���_ SW2 �� SW3��
���دB���a PWM
���H�ϣ�H ���е��_�P���H����ʹ�� MOSFET ���F�ģ���D 3 ��ʾ
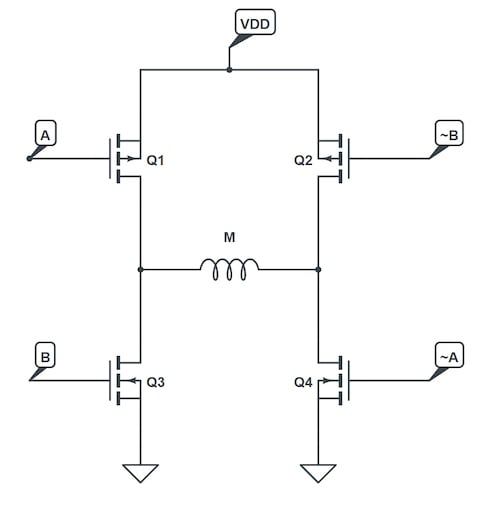
�D 3. ʹ�� MOSFET �� H �F
�M����r���ǿ�����ˣ���H ��ͨ���OӋ�錢�߂��_�P�����B�ӵ� VDD �� FET�����F�� PMOS ���������͂��_�P�����B�ӵ� GND �� FET������ NMOS �������F��
����늙C�r���҂�ּ�ڿ��Ƶ���Ҫ�ɼ����������ٶȺͷ���Ҫ�ڌ��`�������@һ�c���˜�������ʹ�� PWM �� MOSFET �ŘO��ʹ�� PWM���҂�����ͨ�^����늙C��ռ�ձȣ��������_�ĕr�g�ٷֱȣ�������늙C���ٶȣ��@���҂��Ϳ��Ը�����Ҫ��늙C�ṩ�M���ܶ��M�����ٵĹ��ʡ�
�ڈD 3 ���Mһ���@ʾ��Q1 �� Q4 �ĖŘO�Լ� Q2 �� Q3 �ĖŘO�ɱ˴˻��a����̖�ӡ��@�N���Ʒ��������ж����T�� PWM ��̖ 180�� ���� [ҕ�l] �˴��ӣ����Q�黥�a PWM��
��D 4 ��ʾ�����O�ÿɴ_���� Q1 �ĖŘO����ƽ�r��Q4 �ĖŘOͬ�r����ƽ��
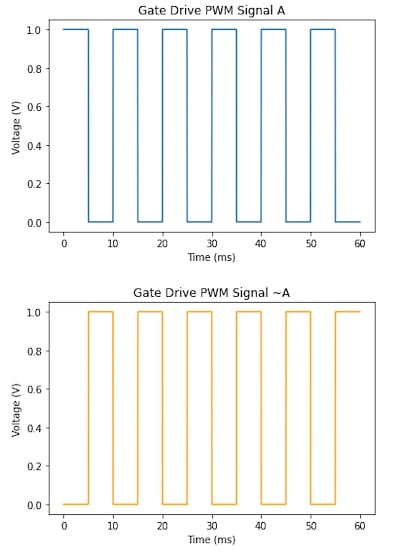
�D 4.���a PWM ��̖
���� Q1 �� PMOS��Q4 �� NMOS��ԓ����ͬ�r�P�]�_�P Q1 �� Q4�����S����������^늙C���ڴ����g��Q2 �� Q3 ��횴��_���@��ζ�� Q2 �ĖŘO����ƽ�� Q3 �ĖŘO����ƽ��
늙C���ư�ȫ��PWM ֱͨ
�� H ����ʹ�û��a PWM �r��һ����Ҫ���]�����Ƕ�·�Ŀ����ԣ�Ҳ�Q�顰ֱͨ����
��D 5 ��ʾ�����ͬһ����ϵăɂ��_�Pͬ�r��ͨ���t H �����ÿ��ܕ����Դ�͵�֮�g���ֱ�Ӷ�·��
�D 5.���ͬһ֧·�ϵăɂ��_�Pͬ�r��ͨ���t���ܕ��l������
�@�N��r���ܷdz�Σ�U����������܌��¾��w�ܺ������·�^��͓p�ġ�
���ڹ����������t�ͷ�������r������ŘO��ݺͶ��O�ܷ���֏�Ч������ֱͨ�ɞ���� FET �� H �����Ҫ���]���ء��@ЩӰ푵ĽY���� MOSFET ����������_�P�������ږŘO������̖���_/�P�]�c MOSFET �������_/�P�]֮�g����С�ĕr�g���t��
�����@�N���t�����a PWM ��̖���ܕ����⌧��ͬһ����ϵ� H �� MOSFET ͬ�r��ͨ���Ķ���������
����ֱ��늙C���Ƶ� PWM ���^�r�g
���˽�Q�� FET ��������r�����ֱͨ���˜ʽ�Q�������� PWM �����Ќ�ʩ���^�r�g��
��ֱ��늙C���Ƶı����£����^�r�g������ͬһ H �����ϵ��_�P�� PWM ��̖���_�P߅��֮�g�����һС�Εr�g���D 6����
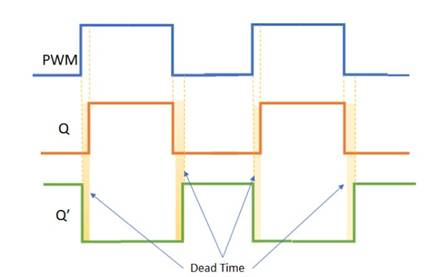
�D 6.���a PWM ��̖֮�g�����^�r�g���DƬ��Widodo �����ṩ
ͨ�^��һ�� FET �P�]����һ�� FET ��֮ͨ�g�����r�g���_�����^�r�g�ɴ_��ͬһ֧·�ϵăɂ����w�ܲ���ͬ�r��ͨ���Ķ���ֹ������
�mȻ�������^�r�g�·������ͨ���ڹ̼��Ќ��F������������ (MCU)���r�������ڻ��a��̖֮�g������������^�r�g�� |