���]���F���h���ď��s�ԣ����y�ҵ�һ�N��һ����������F������PID���ơ��ڱ������������g�У��Ҋ��Ҳ�S���ǿ����Ԅӈ�����ǰ��Ҫ�\���ˆT�քӈ��еIJ��M�yԇ���^���������ͨ�^�ڿ��ƻ���г��m�M��һϵ���A�S���ā������^�̣������H�H��һ���A�S׃�����Ķ��Uչ�˻����IJ��M�yԇ�����@Щ�������^�̣�ʹ�^��׃���ڳ��m�����У�������������֮�g��ʎ��ԓ�yԇ�����ں��ε�ͨ�^�y���^�̵���K���ں���K����������^�̵��О飨��D1�͈D2��ʾ����
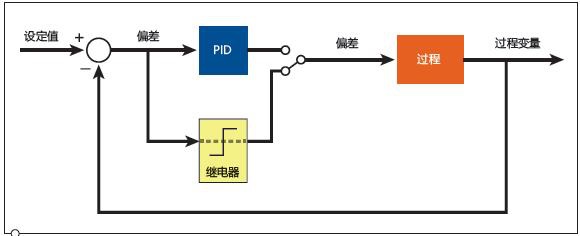
�D 1:���_�P���ӕr���������Ĺ�����ʽ�����һ��������PID�����������_�P�P�]�r������������������� on/off ���^늿�������ԓ���������}�_�����^�������ɘO��ѭ�h��ÿ���}�_�ij��m�r�g���^��׃�������һ���}�_�_���O��ֵ����ĕr�g�Q����
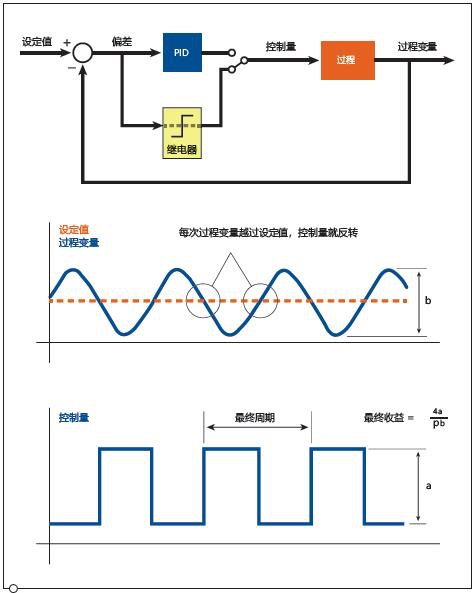
�D 2: �����R�e�^�̵���K����Tu����K���� Pu�����������r������PID�㷨����������Q��on/off �^늣������^��׃����ʎ���@�ɂ����ֿ��Ժܺõ������^���О飬�Դ_���������PID�������ԫ@��������]�h���ܡ�
�����M���^�����������ه��һϵ�в��M�yԇ������������������M�yԇ�ǘӣ����^�����^�r�g���r�g���������������@ʽ�Ĺ�Ӌ������ȫ���^��ģ�^�̣���ʹ��Ziegler-Nichols�{��Ҏ�t�Ĺ�ʽ�����O�����ڵ���K�������K����ֱ���D�Q���{������(Ҋ�D 3)��
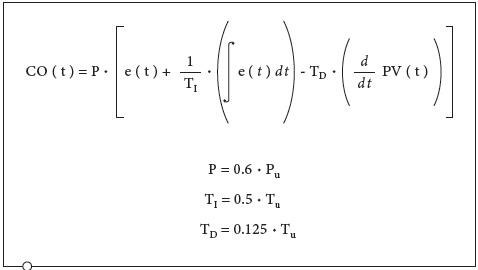
�D 3: һ���^���О�������K����Tu�͘O������Pu���������Ϳ���Ӌ�����������ʎ�l�����F�]�h�A�S푑�������{��������������ķ����ǘ˜ʵ�PID��ʽ������ CO(t)�������^�̵Ŀ��ƻ�ӣ�PV (t)���ɻ�·�������y�����^��׃����e(t)���^��׃�����O��ֵ֮�g��ƫ�
�����@��������ʹ�@�N���g�����ܵ��y������Ӱ푣������ܱ��C��ȫ���ܸɔ_�����s�^�̵�׃���y�������ܕ�ʹ�O�����ڲ���ʧ�棬��Ť���Ԅ��{������������Ĺ�Ӌ��
�����yԇ����Ҳ���o�������һ�����}���O�����ڕ�ʹ�^���Д࣬�_�����ɽ��ܵij̶ȡ����@�N��r�£�ͨ�^��������Ȼ�l���Ĕ_�Ӻ��O��ֵ׃�����g�^�쵽���^���О飬���Ԍ��F��Ļ�·������
������һ���棬�^����������ă��c�����S�\���ˆT��ͨ�^���Ƒ������^�̵Ŀ��������}�_������������^����ʎ��������@Щ�}�_ֻ��������ʹ�O��ѭ�h�c�y�����^���_�����@ʹ�Ԅ��{�������Ԍ��^��Ӱ���С�Ĵ��r���˽��^���О������������Ϣ��
�������W��ģ
����Ҳ�S���������������Ʒ���������Ҳ������s�ķ������ǔ�ֵ�����M�ϡ���Ӌ�����m�ϬF��ݔ��ݔ���������^��ģ�ͅ�����ͨ�^�@�N�������ԏ��^��ģ�����ƌ����������������{���������@Щ���g�Uչ�˻����IJ��M�yԇ���������Ժ��w�����^�r�g���r�g�����������Ԕ�����^��ģ�͡�
����ʹ�Ô�ֵ�����M�ϼ��g��������PID���������Ǹ�ͨ�õ�ģ���A�y���Ʋ��ԣ��@Щ����Ҳ�Ǻܶ��W�g�о������}�����@��Ԅ��{�����У���һЩ߀���Ԯa�����Ŷ����ӣ�����ָʾ�A�yģ���c�ܿ��^�̌��H�О���^��Ч����ģ�͵��A�y�c�^��׃���Č��H܉�E֮�g������ƥ�������ģ�͵Ĝʴ_�Ժͻ���ģ�͵��{�����������^�ߵĿ��Ŷȡ�
�������ھ������@�����^�r�g���ݔ���t��ϵ�y��߀��������һЩ�������������팍�F����ʷ��˹�A�y�������y��ʷ��˹�A�y��ʹ���^��ģ�ͣ����Ô��W��ʽ�����^�r�g���]�h���������PID����������������]�����C�r�gһ���M���{��������ʷ��˹�A�y����������^��ģ�ͣ��Ķ���������^�r�g�a���Ĝʴ_�ԡ�
�����Ǿ��Է��������
�������ҵ��ǣ�����Ĕ��W�{�����g�mȻ������Ӌ����s�ԣ��������ܽ�Q����PID�{�����}��Ҳ�S���ش�������Dz����A�y��Ǿ����^�̡�
�����oՓ���ք�߀���Ԅӣ������е�PID�{�����g���ٶ���ͨ�^�����ׂ��^��׃���y��ֵ�����ׂ��������ә�Ӌ�㣬�@��δ�����^��׃��ֵ���M�ܿ��Լ{���^��ģ����������A�y�����Ěvʷ�����c�Ĕ����]�����ƣ���������IJ��M�yԇ�Ԅ��{���������������@�ɂ�׃�����Ե����vʷֵ��̎����
����δ֪�Ĕ_�ӣ����ܕ�ʹ�A�y�^��׃����δ��ֵ׃���ஔ���y������ʹ�_�ӿ��Ժ��Բ�Ӌ���^ȥ�Ŀ��������^ȥ���^��׃���ĺ��μә���ӣ��������ܜʴ_���A���^��׃���ķ���
�������}�Dz������е��^�̶���ͨ�^�@�N�ә�����^��ģ�́�������������磬��pHֵ�����Ĺ�ˇ�^�̣�ֻ���c����ģ�ͽ��ƣ�ͨ��ֻ��pHֵ���^խ�����Ȳ��ӵ���r�²��܌��F���Ƶľ��ԡ�
��������Ԅӳ����[ʽ���@ʽ��ه�ھ����^��ģ�ͣ��t��Y����Ť���̶ȣ��c�^�̌��H�ԷǾ��Է�ʽ�\�еij̶�һ�¡���̎���Ǿ����^�̵Ĕ��W׃ͨ�k���������w�đ��ó�������Ҫ��һ���������e������������������y�Ԍ��F��
���������M�ϵă���
������һ���棬�����M���Ԅ��{�����ă������܉��ۙ�S�r�g׃�����^���О顣�����ˮλ���Ɔ��}�������cˮ��һ��ˮ�Ĺ��r��ȣ���ˮ���ȫ�յ���r�£���ˮ���мӻ��ߜpȥһ�Ӂ�ˮ����ˮλ��Ӱ�Ҫ��öࡣҲ�����f ���S���^��׃����׃����������S���r�g�����ƶ�׃����
������������ݔ��ݔ������������������^��ģ�͵������M���Ԅ��{���������κνo���r�g�c���oՓˮ���ж��M������ԓ�܉��R�e�^�����档һ��ֻ�Ю����������{�Õr�ň��������������Ļ����Ԅ��{��������ˮλ�ͻ�ߕr�����l�F�����{���^�ڱ��ػ��^�ڼ��M��
�����@��Ԅ��{������ͨ�����Q�� �����m���� �����������ҵ��ǣ����m��������Ҳ�����f�ܵġ�����^���О�׃���^�죬���箔����ˮ�䱻���ٹ��b�r���ھ���ģ���o�����ϡ�����������ѳɹ�������������Ŀ���O��ֵ���^��׃���t���������l����׃����ô�ھ���ģ����ȱ���κ����õĔ������ռ��^��ģ����Ϣ��ʧ����
�������������ᵽ���@Щԭ��ʹPID�������_ʼ�������I�^���Ԅӻ��I���F�����������m�����ƵĆ�һ��ѷ�����Ȼ�y�Դ_���� |