| �S�����I�Ԅӻ��̶ȵIJ�����ߣ��ŷ����Ƽ��g�������Ӽ��g����Ӽ��g�Ŀ��ٰlչ���ŷ��\���c���Ƽ��gҲ�ڲ���������죬늙C�\�ӿ���ƽ�_����һ�N�����ܵĜyԇ��ʽ�ѽ����V�����ã��˂����ŷ����ܵ�Ҫ��Ҳ�ڲ�����ߡ�

һ�����h����ԭ��
1������������h���˭h��ȫ���ŷ������Ȳ��M�У�ͨ�^�����b�Ùz�y�����o늙C�ĸ����ݔ�������ؓ�����o������O���M��PID�{�����Ķ��_��ݔ������M���ӽ������O�����������h���ǿ���늙C�D�صģ��������D��ģʽ���������\����С���ӑB푑���졣
2���ڶ��h���ٶȭh��ͨ�^�z�y���ŷ�늙C���a������̖���M��ؓ���� PID �{�������ĭh�� PID ݔ��ֱ�Ӿ�������h���O���������ٶȭh���ƕr�Ͱ�������Ƥ�h������h���Q��Ԓ�f�κ���ʽ�����ʹ������h������h�ǿ��Ƶĸ��������ٶȺ�λ�ÿ��Ƶ�ͬ�rϵ�y���HҲ���M��������D�أ��Ŀ������_�����ٶȺ�λ�õ��������ơ�
3�������h��λ�íh����������h�����J���������ŷ�늙C���a���g����Ҳ�������ⲿ��������늙C���a������Kؓ�d�g������Ҫ�������H��r����������λ�ÿ��ƭh�Ȳ�ݔ�������ٶȭh���O����λ�ÿ���ģʽ��ϵ�y�M�������� 3 ���h���\�㣬�˕r��ϵ�y�\������ӑB푑��ٶ�Ҳ������
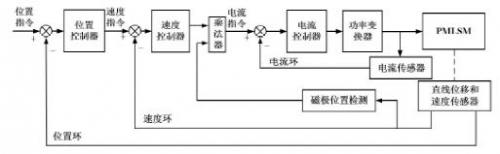
�D 1.1
����Ӱ푿��Ƶ�����
1���ٶȭh��Ҫ�M��PI�������ͷe�֣��������������棬�����҂�Ҫ���ٶ�������ٶȷe�֕r�g�����M�к��m���{�������_������Ч����
2��λ�íh��Ҫ�M��P���������{���������҂�ֻҪ�O��λ�íh�ı�������ͺ��ˡ����M��λ��ģʽ��Ҫ�{��λ�íh�r��������{���ٶȭh��λ�íh���ٶȭh�ą����{���]��ʲô�̶��Ĕ�ֵ��Ҫ�����ⲿؓ�d�ęCе�����B�ӷ�ʽ��ؓ�d���\�ӷ�ʽ��ؓ�d�T�������ٶȡ����ٶ�Ҫ���Լ�늙C�������D�ӑT����ݔ���T���ȵȺܶ��l����Q�����{���ĺ��η������ڸ����ⲿؓ�d����r�M�д��w���ķ����Ȍ����慢����С�����{���e�֕r�g�����Ĵ���С�{���Բ����F���ӳ��{�ķ��Bֵ�����ֵ�M���O����
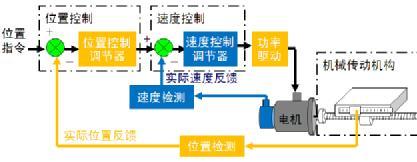
�D 1.2
����MES-100���Ʒ�ʽ
1��MES-100�\�ӿ���ƽ�_��늙C�����dϵ�y��늙C�ӳ����{ԇϵ�y�������ɼ����Դϵ�y�M�ɡ���늙C���Ә�����������Ӳ��ܛ�����h�����ṩȫ�_��ʽ��ܛӲ���ӿڣ������S���ĿɔUչ�Խ̌W�w����늙C�R�e�����D��늙CЧ�ʜyԇ��늙C�����y����늙CT-N�����yԇ��늙C�\�ӿ��Ƽ����a��ʸ���D�أ��o��ʸ���ٶȷ����Ȝyԇ���yԇ�Y�����D1.3��
2���ŷ�늙C���ٶȺ��D�ؿ��ƶ�����ģ�M�������Ƶģ�λ�ÿ�����ͨ�^�l�}�_�����Ƶģ������늙C���ٶȺ�λ�ö��]��Ҫ����Բ��ú��D��ģʽ����ͨ�^���r�ĸ�׃ģ�M�����O������׃�O�������ش�С��Ҳ����ͨ�^ͨӍ��ʽ��׃�����ĵ�ַ�Ĕ�ֵ�팍�F�������λ�ú��ٶ���һ�����M��Ҫ����Բ����ٶȻ�λ��ģʽ��λ�ÿ���ģʽһ����ͨ�^�ⲿݔ����}�_�l�ʁ��_���D���ٶȵĴ�С��ͨ�^�}�_�Ă������_�J�D�ӵĽǶȣ�����λ��ģʽ���Ԍ��ٶȺ�λ�ö��к܇���Ŀ��ƣ��ИI���ñ��^�V����

�D1.3
|